




技术支持
固定式和臂上式3D相机的区别
-
来源:光虎
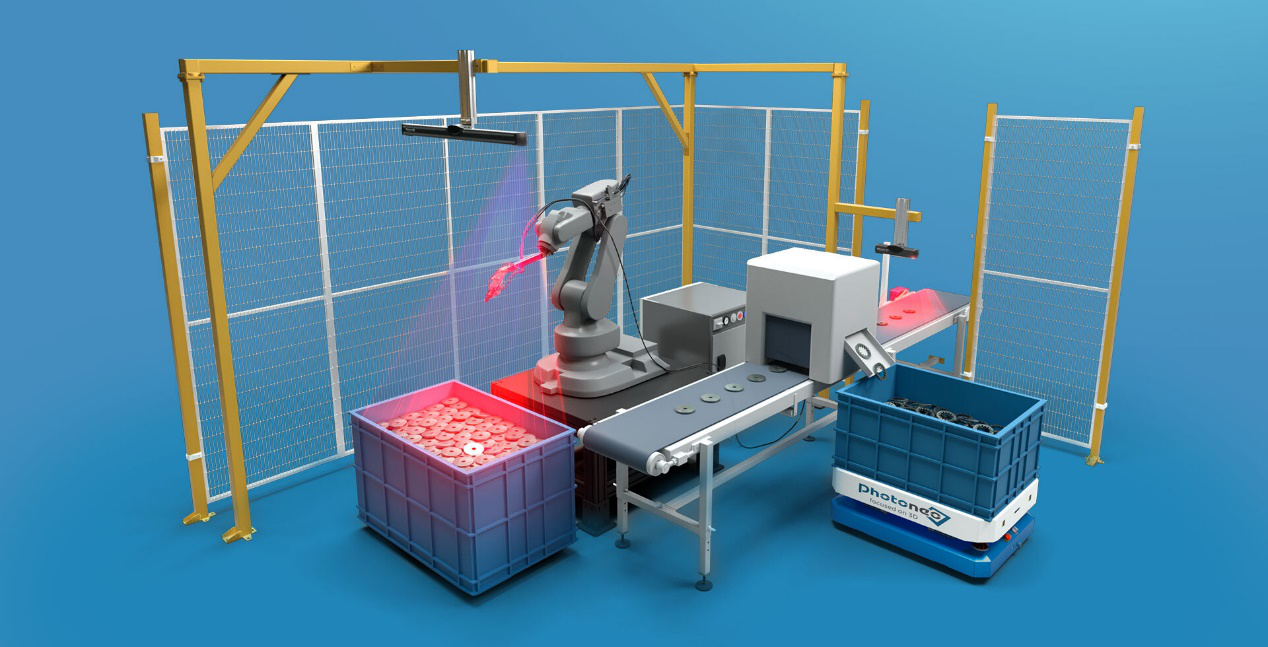
如今,大多数3D视觉传感器都安装在墙上、天花板上或定制的设备上,以精确地捕捉目标物体的点云。点云使工业机器人能够完成零件抓取、码垛、组装等方面的任务。
许多系统集成商使用固定安装作为可视化机器人的首选解决方案。它可以很容易地安装所有的3D相机。
另一方面,将3D相机直接连接到机器人手臂上就不那么常见了。尽管将摄像头直接安装在机器人手臂上并不常见,但这种方法可以创建一个更灵活和更有效的系统。
为什么会将3D相机安装到机器人上?
1、高灵活性
许多机器视觉方面的挑战都是由距离的限制造成的。因此,在某些挑拣类应用中,保持相机在一个固定的位置可能会导致图像质量不一致。长距离传输往往会导致低质量的3D点云,这无疑增加了抓取的误判性和物体的无法识别。
例如,在拆垛环境中,理想情况下尽可能使用高3D图像质量来覆盖整个场景。然而,当机器人不断拆垛时,工作距离不断增大,点云的质量也在不断降低。
在机器人上安装3D相机就解决了这一问题,因为它允许3D相机总是在最佳工作距离使用。还可以从不同的角度捕获点云,以更好地查看目标对象。检测算法接收到的数据质量越高,就可以获得更准确的物体位置信息,更好的做出相应的判断。
在机器人上安装3D相机还有另一个好处,就是可以允许机器人解决由于遮挡导致的一系列问题。遮挡会导致被测物体细节的丢失,并会对点云的质量产生负面影响。通过臂上式3D相机安装,可以获得更广泛的成像角度。
2、高性价比
使用臂上式3D相机产生的结果是,不需要多个镜头来捕捉物体。你可以使用一个机器人上安装的3D相机从不同的角度和位置捕捉点云,而不是在不同的挑选和放置位置安装相机。臂上3D视觉系统通过减少需要安装、校准、维护和维修的组件的数量,将成本降至最低。
3、适应性
依靠固定安装来获得一致和最佳的成像数据并不总是可行的。有些工作站可能空间有限,而在中小企业中,工作站可能会频繁变化。通过安装在机器人上的3D相机,它更容易确保一致的图像质量和在新的或具有挑战性的工作环境中具有可靠的性能。

固定式安装和臂上式安装
固定式安装
当使用3D和机器人进行物体分拣等应用时,最常见的设置是将3D相机放置在一个相对于目标的固定位置。像这样的固定位置通常是在料框的上方或侧面。
典型的3D相机(包括结构光和线激光)都有特定的距离和区域,工作范围限制意味着需要考虑其灵活性。
与2D相机相比,3D相机不需要严格的自上而下视图。它们也不需要外部照明光源或其他成像硬件。
固定式安装的优势:
· 一个固定式安装的3D相机基本与其他机构或者机器人没有碰撞。
· 一旦物体被挑拣出来,3D相机可以立即进行新的点云捕获和处理。
·机器人的工作周期时间可以很短,并且不太需要等待3D相机。
·在连接电缆时,固定式安装花费更少的精力。

臂上式安装
也就是将3D相机直接安装到机器人臂上。在这种配置中,视觉系统与机器人和末端执行器(工具或夹持器)一起移动。将3D相机直接连接到机器人臂上,可以实现一个更加有效的解决方案,因为3D相机在其最佳空间工作,只受机器人的范围影响,而不是始终固定的单一视图。
臂上式安装的优势:
-
从多个位置捕获数据。安装在机器人上的3D相机可以选择捕捉点云的目标区域。从不同的角度来看,总是能得到最好的点云质量和覆盖范围。
-
可以只使用一台3D相机来同时实现物体定位抓取和放置。
【来源:光虎光学内部培训资料】
-

微信服务号
-

手机站
-

光虎光学抖音





